آموزش سیستم های کنترل خطی – مرور و حل نمونه سوالات کنکور ارشد
در درس سیستم های کنترل خطی (Linear Control Systems) به موضوع تحلیل سیستم های دینامیکی خطی و طراحی کنترل کننده برای این سیستم ها پرداخته می شود. روش هایی که در این درس مورد بررسی قرار می گیرند، روش های پایه ای و اساسی مهندسی کنترل هستند و پیش نیاز مهم سایر درس های رشته مهندسی کنترل محسوب می شوند.
- درس یکم: مقدمه ای بر سیستم های کنترل
- مقدمه ای از علم کنترل
- تاریخچه ای از علم کنترل
- تعاریف
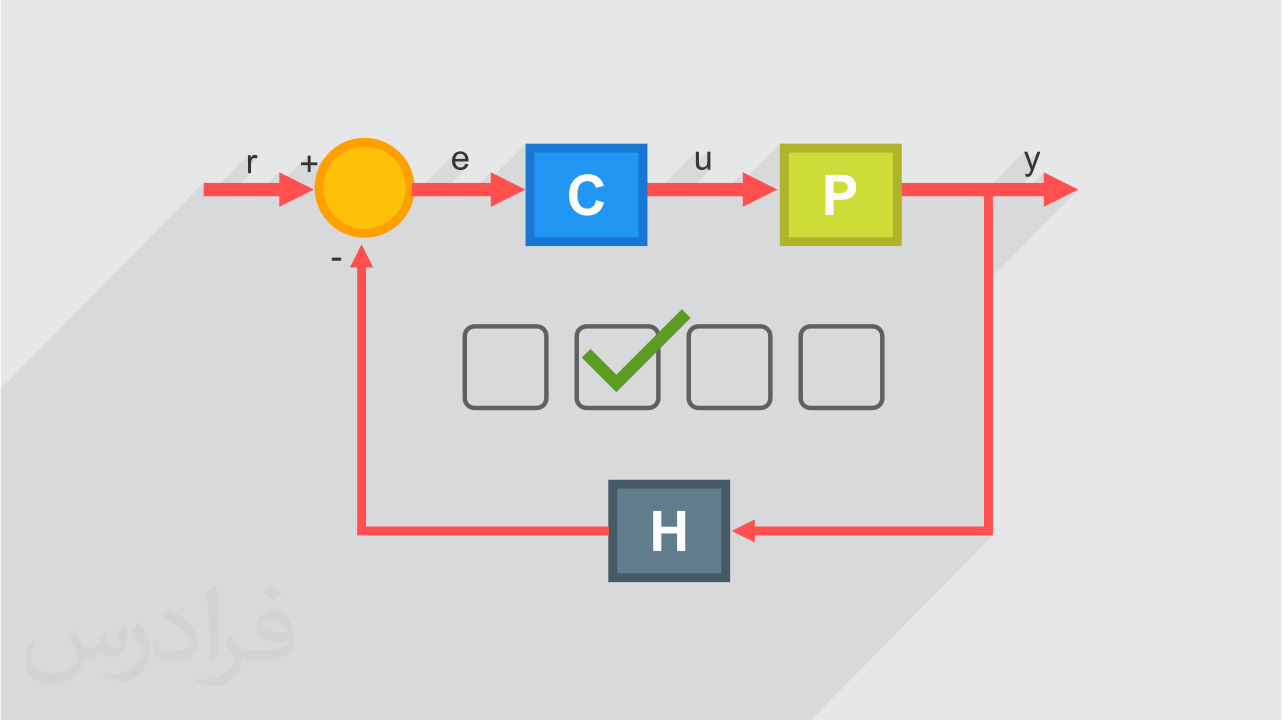
- سیستم های حلقه بسته و حلقه باز
- مثال هایی از سیستم های کنترل
- اصول طراحی سیستم های کنترل
- درس دوم: مقدمه ای بر تبدیل لاپلاس
- توابع مختلط
- تعریف تبدیل لاپلاس
- قضایا و قوانین تبدیل لاپلاس
- بسط کسر جزئی (Partial Fraction Expansion)
- تبدیل معکوس لاپلاس
- درس سوم: مدل سازی ریاضی سیستم های فیزیکی
- تابع تبدیل
- خطی سازی مدل های ریاضی غیر خطی
- نمودارهای بلوکی، تعاریف و مؤلفه های تشکیل دهنده نمودار بلوکی
- تعیین تابع تبدیل سیستم های فیزیکی
- روش میسون در تعیین تابع تبدیل از روی بلوک دیاگرام
- درس چهارم: مدل سازی ریاضی سیستم های مکانیکی، الکتریکی و هیدرولیکی
- مدل سازی ریاضی سیستم های مکانیکی
- مدل سازی ریاضی سیستم های الکتریکی
- مدل سازی ریاضی سیستم های هیدرولیکی
- حل تست
- درس پنجم: تحلیل پاسخ حالت ماندگار و گذرا
- سیستم های مرتبه اول
- سیستم های مرتبه دوم
- سیستم های مرتبه بالاتر
- پاسخ زمانی سیستم ها
- آشنایی با مفهوم قطب ها و صفرها
- بررسی تأثیر قطب و صفر بر پاسخ سیستم
- تأثیر عامل مشتق گیر و انتگرال گیر بر روی عملکرد سیستم ها
- خطای حالت دائم در سیستم های حلقه باز
- خطای حالت دائم در سیستم های کنترل با فیدبک واحد
- خطای حالت ماندگار برای ورودی پله (Step)
- خطای حالت ماندگار برای ورودی شیب رمپ یا Ramp
- خطای حالت ماندگار برای ورودی ضربه یا Impuls
- حل تست
- درس ششم: روش پایداری روث – هرویتس
- معرفی روش پایداری روث – هرویتس
- طراحی کنترلر با استفاده از روش پایداری روث – هرویتس
- حل تست
- درس هفتم: تحلیل و طراحی سیستم های کنترل با استفاده از روش مکان هندسی ریشه ها
- ترسیم نمودار مکان هندسی ریشه ها
- ترسیم نمودار مکان هندسی ریشه ها برای سیستم های فیدبک مثبت
- طراحی سیستم های کنترل با استفاده از نمودار مکان هندسی ریشه ها
- طراحی کنترل کننده تناسبی (P)
- طراحی کنترل کننده تناسبی و انتگرال گیر (PI)
- طراحی کنترل کننده تناسبی و مشتق گیر (PD)
- طراحی کنترل کننده تناسبی، انتگرال گیر و مشتق گیر (PID)
- بررسی تأثیر افزودن قطب یا صفر
- حل تست
منبع:

فرادرس