آموزش طراحی و تنظیم ضرایب کنترل کننده پی آی دی PID با منطق فازی
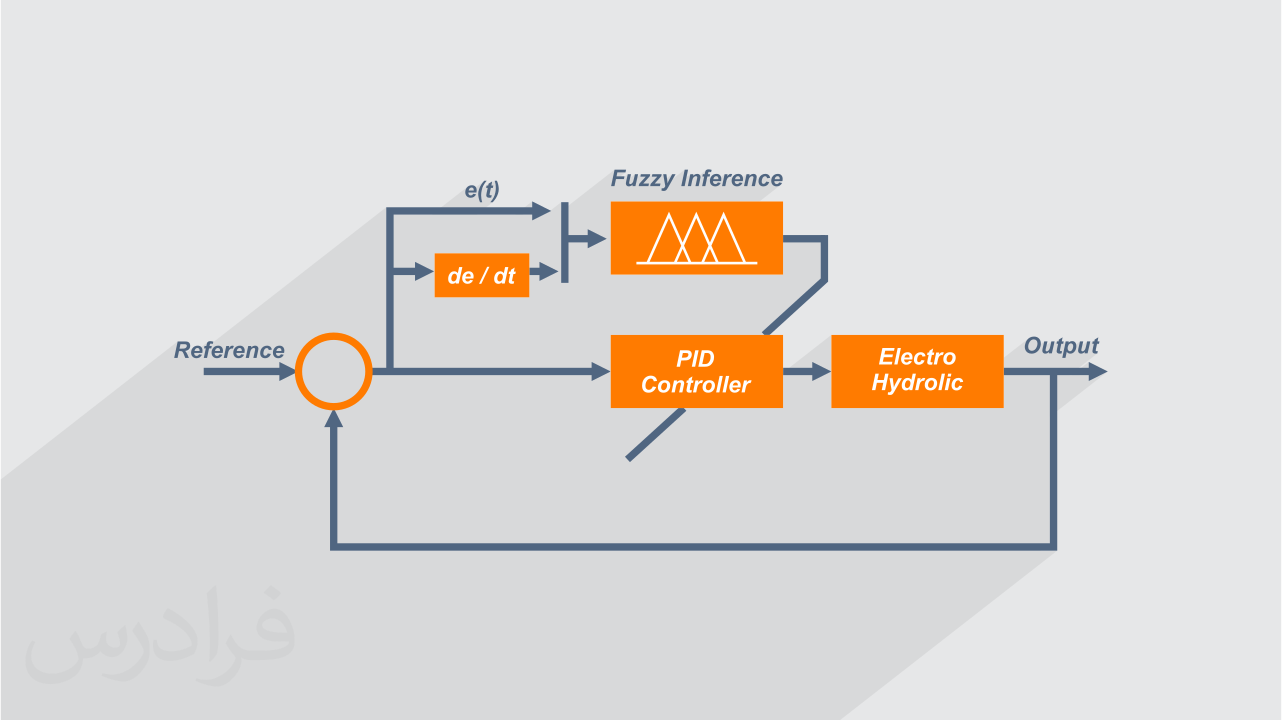
در فرادرس آموزش طراحی و تنظیم ضرایب کنترل کننده PID با منطق فازی، رویکردی مشابه با کنترل کننده های تطبیقی و با تکیه بر توان استنتاج سیستم های فازی ایجاد شده است که در هر لحظه از زمان، برای مقادیر ضرایب کنترل کننده PID پیشنهادی به خصوص را دارد. این رویکرد، نوعی زمان بندی بهره یا Gain Scheduling است که وظیفه تعیین مقادیر بهره ها، بر عهده یک سیستم فازی است. این سیستم فازی، با دریافت خطا و مشتق خطا در هر لحظه از زمان، مقادیر ضرایب کنترل کننده PID را به صورت مناسبی محاسبه و در ساختار کنترل کننده جایگذاری می نماید.
منبع: 
فرادرس
299,000 تومان
شنبه 25 آبان 1404، ساعت 05:17